Plot phase portrait with MATLAB and Simulink
Plot phase portrait with MATLAB and Simulink
 phase plane
phase plane
Nonlinear Systems
If a system includes one or more nonlinear devices, the system is called a nonlinear system. Every control system is essentially nonlinear. The characteristics of the nonlinear systems can not be described using linear differential equations.
Characteristics of nonlinear systems
-
The stablity of a nonlinear system depends on its initial conditions, the inputs to the system, and the system parameters
-
There may exist multiple equilibrium in a nonlinear system, in other words, there may have multiple solutions for $\dot{x} = 0$
-
The systems may be caught in the state of self-excited oscillation (limit cycle) compared with linear systems
-
The outputs of the nonlinear system usually contain additional frequency components and my not contain the original input frequencies.
Analysis and Design Methods of Nonlinear Systems
- Phase plane (which will be discussed in this article)
- Describing function
- MATLAB (implemented in this article)
Phase plane anaylsis1
Phase Plane Analysis is a graphical method for studying first and second-order systems by
-
providing motion trajectories corresponding to various initial conditions.
-
then examine the qualitative features of the trajectories.
-
finally obtaining information regarding the stability and other motion patterns of the system.
Example 1
Q: Let’s start with a linear system:
$$\ddot{x} + x = 0$$
Method 1: Calculate by hands with phase plane analysis
First, find the eigenvalues of the characteristic equation: $$ \begin{aligned} &\lambda^{2}+1=0\\ &s_{1,2}=\pm i \end{aligned} $$
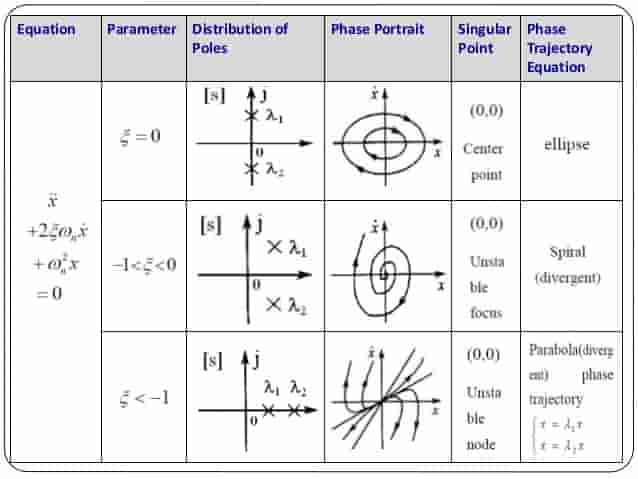
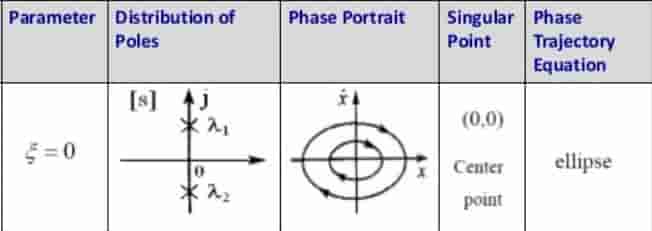
And we know that with such pole distribution, the phase portrait should look like:
Let’s see what we’ll get using MATLAB Simulink
Method 2: Running Simulink simulation
Steps to follow:
- Find out the input and output
- Describe the system with basic components, i.e. integrators, gain, etc.
- Implement the system
System Topology

In a second order system, we could cascade integrators in order to get $x, \dot{x}$ and $\ddot{x}$
Since the differential equation of the system is in the form of:
$$\ddot{x} + x = 0$$
we could find out the relationship between $\ddot{x}$ and $x$ by moving $x$ to the right of the equation.
$$\ddot{x} = -x$$
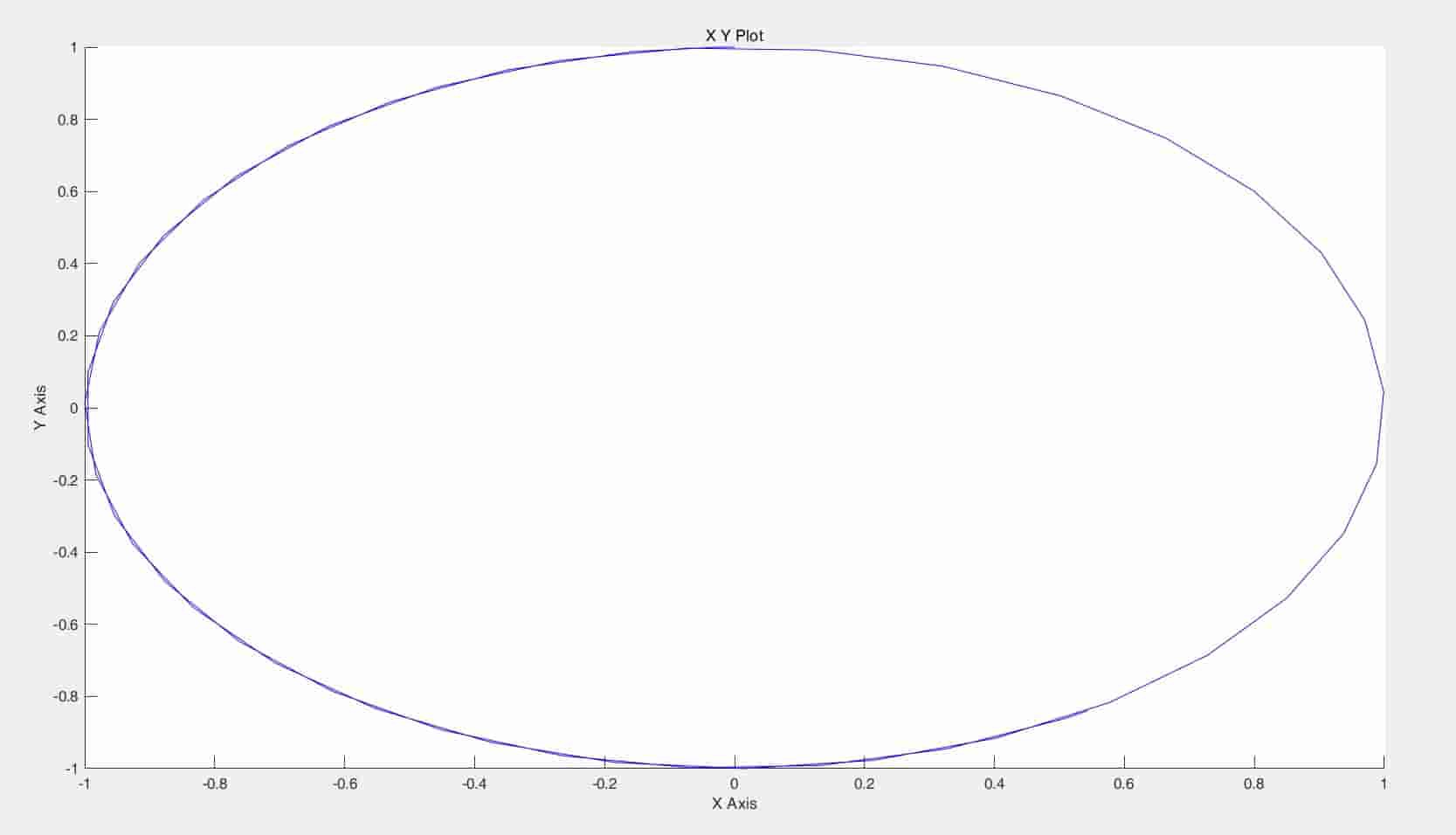
Phase portrait
Example 2
Q: Find the phase portrait of this second-order nonlinear system with such differential equation:
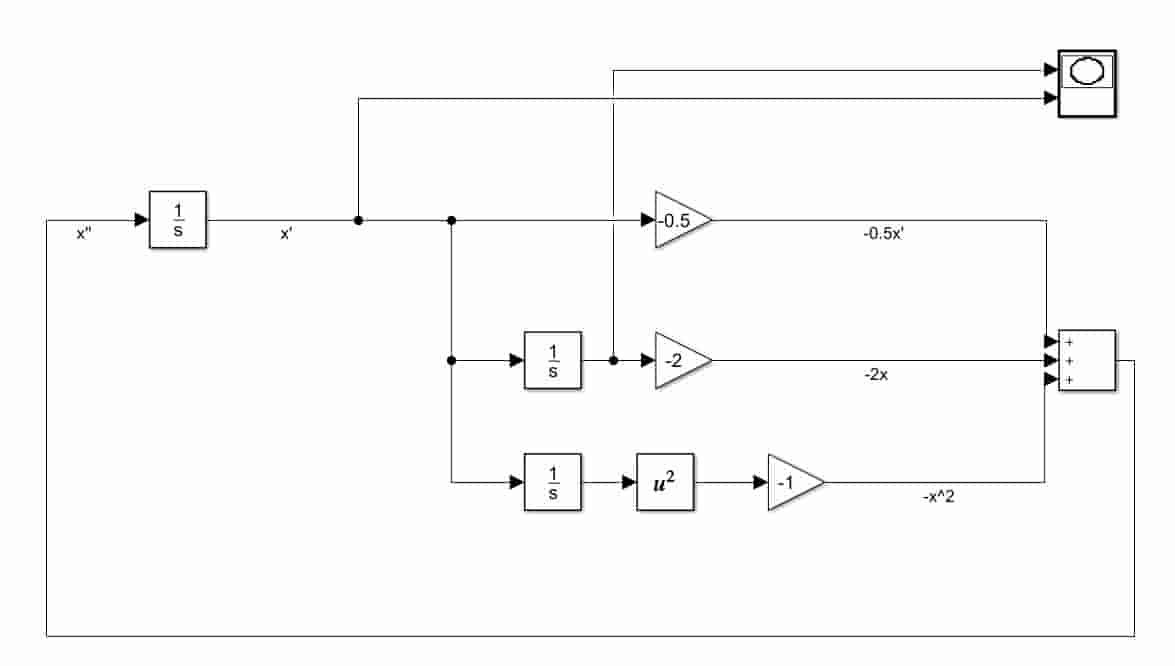
$$ \ddot{x}+0.5 \dot{x}+2 x+x^{2}=0 $$
Leaving $\ddot{x}$ on the left side of the equation, we can get the following equation $$ \ddot{x} = -f(x, \dot{x}) = -0.5\dot{x}-2x-x^2 $$
Method 1: Calculate by hands with phase plane analysis
First, find the singularity points of the system, make
$$ \frac{d \dot{x}}{d x}=-\frac{0.5 \dot{x}+2 x+x^{2}}{\dot{x}}=\frac{0}{0} $$
then we could find our two singularity points
$$ \left\{\begin{array}{l} x=-2 \\ \dot{x}=0 \end{array}\right. $$ and $$ \left\{\begin{array}{l} x=0 \\ \dot{x}=0 \end{array}\right. $$
Therefore, the singularity points of the system lie at $(0, 0)$ and $(-2, 0)$ on the phase plane.
Next, let’s linearize the differential equation $f(\dot{x}, x)$ and then solve for the roots for the equation (also serve as system poles) in order to get the phase portrait.
$$ \left.\frac{\partial f(\dot{x}, x)}{\partial x}\right|_{x=0 \atop \dot{x}=0}=2 x+2=2 $$
$$ \left.\frac{\partial f(\dot{x}, x)}{\partial \dot{x}}\right|_{x=0 \atop \dot{x}=0}=0.5 $$
The linearized system differential equation should look like:
$$ f(\dot{x}, x)=\ddot{x}+0.5 \dot{x}+2x = 0 $$
And the poles are:
$$ s_{1,2}=-0.25\pm 1.39i$$
which means $(0,0)$ is a stable focus.
By the same token, we could get the poles for the other singularity point $(-2, 0)$
$$ s_{1}=1.19$$ $$s_2 = 0.968i$$
Thus, $(-2, 0)$ is a saddle point.
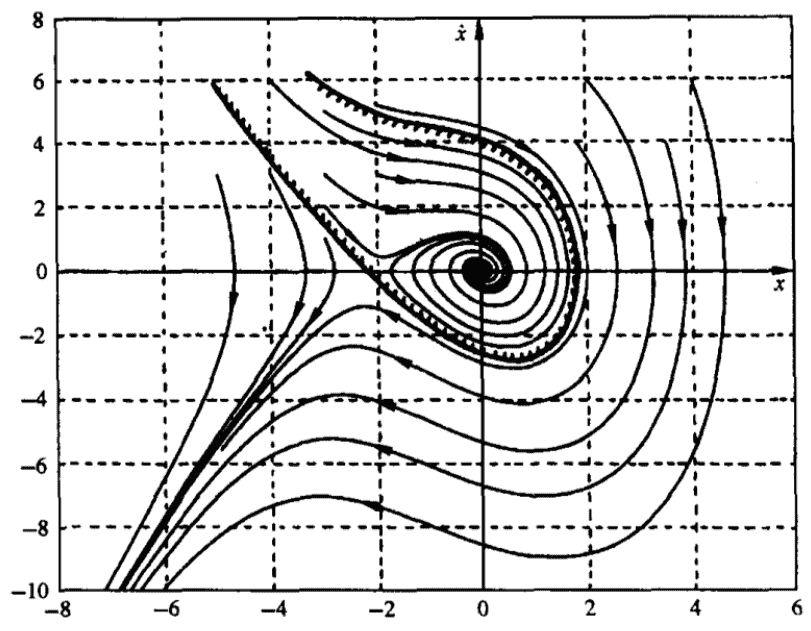
And we know that with such pole distribution, the phase portrait should look like:
Method 2: Running Simulink simulation
Method 3: MATLAB script2
-
Step1. First create the file
vectfieldn.min your working directory% vectfieldn.m % vectfieldn vector field for system of 2 first order ODEs, % with arrows normalized to the same length % vectfield(func,y1val,y2val) plots the vector field for the system of % two first order ODEs given by func, using the grid of y1val and % y2 values given by the vectors y1val and y2val. func is either a % the name of an inline function of two variables, or a string % with the name of an m-file. % By default, t=0 is used in func. A t value can be specified as an % additional argument: vectfield(func,y1val,y2val,t) function vectfield(func,y1val,y2val,t) if nargin==3 t=0; end n1=length(y1val); n2=length(y2val); yp1=zeros(n2,n1); yp2=zeros(n2,n1); for i=1:n1 for j=1:n2 ypv = feval(func,t,[y1val(i);y2val(j)]); yp1(j,i) = ypv(1); yp2(j,i) = ypv(2); end end len=sqrt(yp1.^2+yp2.^2); quiver(y1val,y2val,yp1./len,yp2./len,.6,'r'); axis tight; -
Step 2. Create another file named
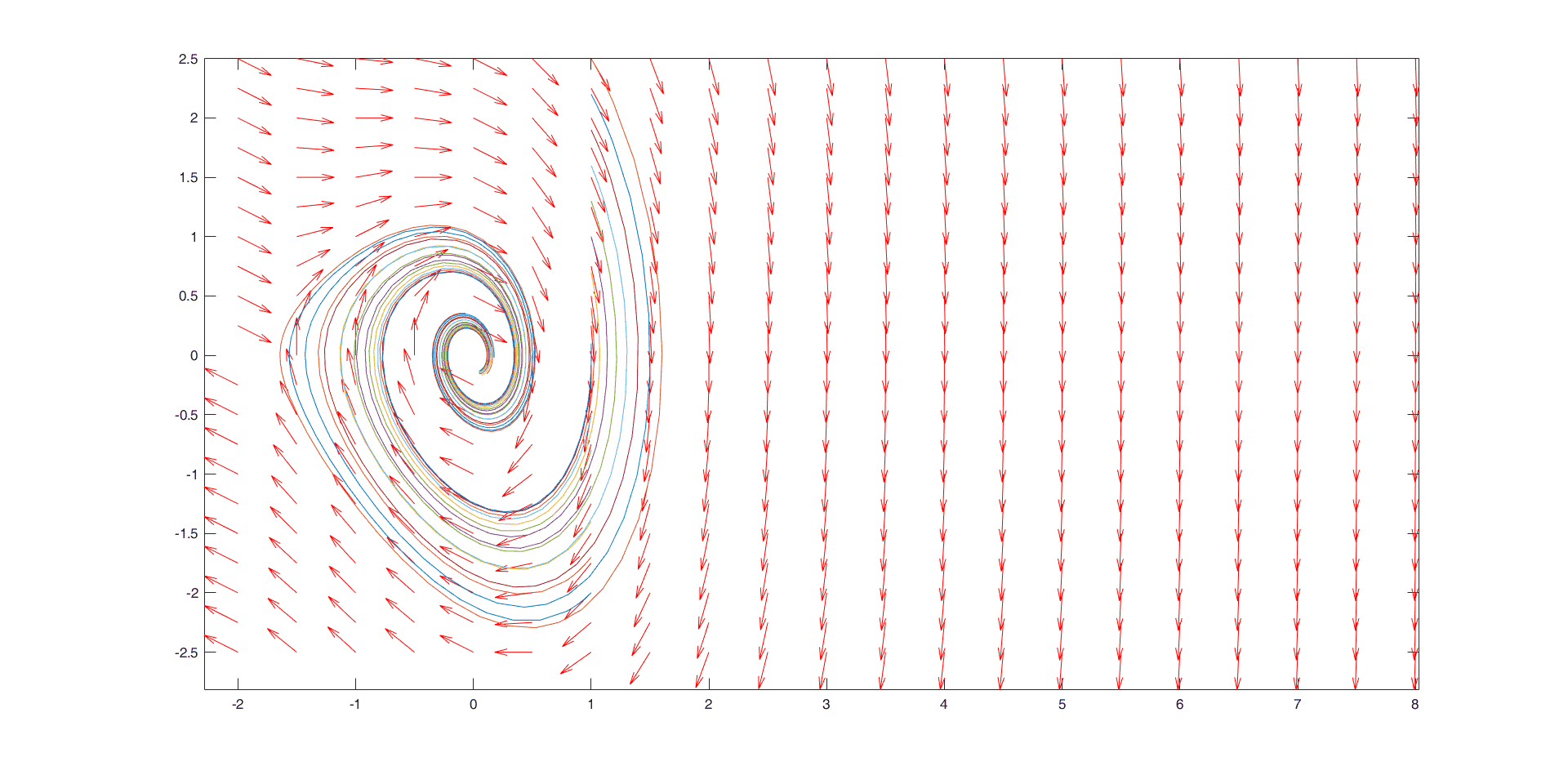
main.mand fill in the following code% main.m % init at (1, y20) where y20 are -2:0.3:2.7 could try other initial points f = @(t,y) [y(2);-0.5*y(2)-2*y(1)-y(1)^2] vectfieldn(f,-2:.5:8,-2.5:.25:2.5) hold on for y20=-2:0.3:2.7 [ts,ys] = ode45(f,[0,10],[1;y20]); plot(ys(:,1),ys(:,2)) end hold off![]()
phase portrait get from matlab script
-
A good illustration on the phase plane analysis could be found at http://ele.aut.ac.ir/~abdollahi/Lec_1_N10.pdf ↩︎
-
Reference tutorial: http://www.javadtaghia.com/control-system-math/non-linear-control/matlabphaseplot ↩︎