Tables in $\LaTeX$
This archive stores the code for some of my favorite $\LaTeX$ tables. Feel free to use them 😃. The code snippet can be viewed by clicking on
The .tex code for thisbutton.
Regular Collections
Table with long discriptions
\usepackage{tabularx}
\begin{table}[h]
\centering
\begin{tabularx}{\textwidth}{lXl}
\toprule
Model Name & Description & Types\\
\midrule
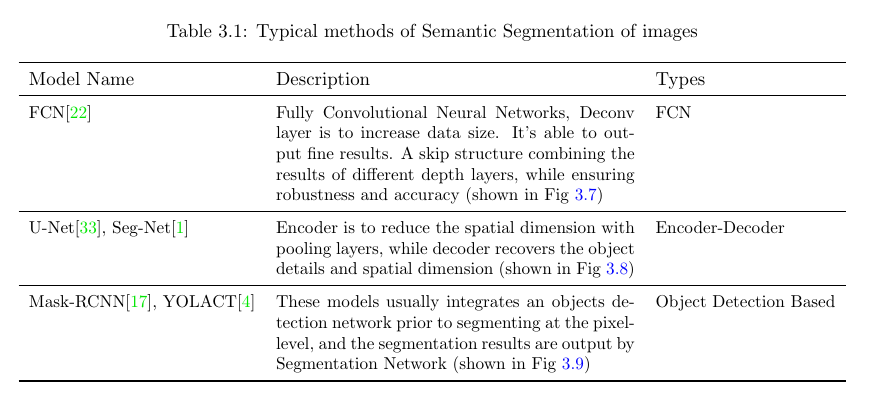
\small FCN\cite{long2015fully} & \small Fully Convolutional Neural Networks, Deconv layer is to increase data size. It's able to output fine results. A skip structure combining the results of different depth layers, while ensuring robustness and accuracy (shown in Fig \ref{fig:fcn}) & \small FCN \\\midrule
\small U-Net\cite{ronneberger2015u}, Seg-Net\cite{badrinarayanan2017segnet} & \small Encoder is to reduce the spatial dimension with pooling layers, while decoder recovers the object details and spatial dimension (shown in Fig \ref{fig:enco-deco}) & \small Encoder-Decoder \\\midrule
\small Mask-RCNN\cite{he2017mask}, YOLACT\cite{bolya2019yolact} & \small These models usually integrates an objects detection network prior to segmenting at the pixel-level, and the segmentation results are output by Segmentation Network (shown in Fig \ref{fig:objbased}) & \small Object Detection Based \\
\bottomrule
\end{tabularx}
\caption{Typical methods of Semantic Segmentation of images}
\label{tab-seg}
\end{table}%
Sideway table
\begin{sidewaystable}
\centering
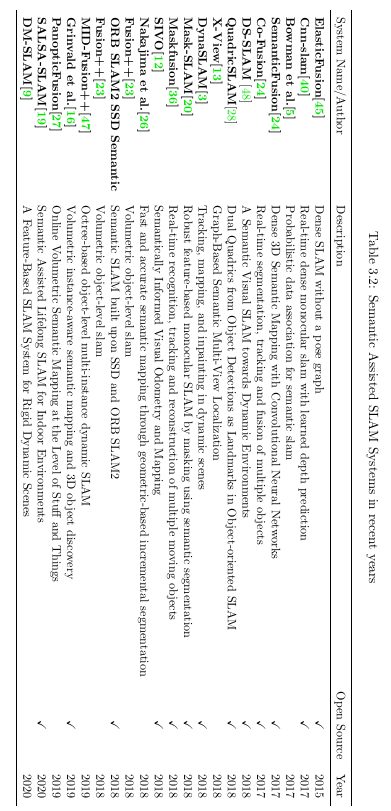
\caption{Semantic Assisted SLAM Systems in recent years}
\label{tab-methods}
\small
\begin{tabular}{llcc}
\toprule % 顶部的那个横线
System Name/Author & Description & Open Source & Year \\
\midrule % 中间那条线
\textbf{ElasticFusion\cite{whelan2015elasticfusion}} & Dense SLAM without a pose graph & \checkmark & 2015 \\
\textbf{Cnn-slam\cite{tateno2017cnn}} & Real-time dense monocular slam with learned depth prediction & \checkmark & 2017 \\
\textbf{Bowman et al.\cite{bowman2017probabilistic}} & Probabilistic data association for semantic slam & & 2017 \\
\textbf{SemanticFusion\cite{mccormac2017semanticfusion}} & Dense 3D Semantic Mapping with Convolutional Neural Networks & \checkmark & 2017 \\
\textbf{Co-Fusion\cite{mccormac2017semanticfusion}} & Real-time segmentation, tracking and fusion of multiple objects & \checkmark & 2017 \\
\textbf{DS-SLAM} \cite{yu2018ds}& A Semantic Visual SLAM towards Dynamic Environments & \checkmark & 2018 \\
\textbf{QuadricSLAM}\cite{nicholson2018quadricslam} & Dual Quadrics from Object Detections as Landmarks in Object-oriented SLAM & \checkmark & 2018 \\
\textbf{X-View\cite{gawel2018x-view}} & Graph-Based Semantic Multi-View
Localization
& & 2018 \\
\textbf{DynaSLAM\cite{bescos2018dynaslam}} &Tracking, mapping, and inpainting in dynamic scenes & \checkmark & 2018 \\
\textbf{Mask-SLAM\cite{kaneko2018mask}} & Robust feature-based monocular SLAM by masking using semantic segmentation & \checkmark & 2018 \\
\textbf{Maskfusion\cite{runz2018maskfusion}} & Real-time recognition, tracking and reconstruction of multiple moving objects & \checkmark & 2018 \\
\textbf{SIVO\cite{ganti2018sivo}} & Semantically Informed Visual Odometry and Mapping & \checkmark & 2018 \\
\textbf{Nakajima et al.\cite{nakajima2018fast}} & Fast and accurate semantic mapping through geometric-based incremental segmentation & & 2018 \\
\textbf{Fusion++\cite{mccormac2018fusion++}} & Volumetric object-level slam & & 2018 \\
\textbf{ORB SLAM2 SSD Semantic} & Semantic SLAM built upon SSD and ORB SLAM2 & \checkmark & 2018 \\
\textbf{Fusion++\cite{mccormac2018fusion++}} & Volumetric object-level slam & & 2018 \\
\textbf{MID-Fusion++\cite{xu2019mid}} & Octree-based object-level multi-instance dynamic SLAM & & 2019 \\
\textbf{Grinvald et al.\cite{grinvald2019volumetric}} & Volumetric instance-aware semantic mapping and 3D object discovery & \checkmark & 2019 \\
\textbf{PanopticFusion\cite{narita2019panopticfusion}} & Online Volumetric Semantic Mapping at the Level of Stuff and Things & & 2019 \\
\textbf{SALSA-SLAM\cite{SALSA2020}} & Semantic Assisted Lifelong SLAM for Indoor Environments & \checkmark & 2020 \\
\textbf{DM-SLAM\cite{cheng2020dm}} & A Feature-Based SLAM System for Rigid Dynamic Scenes & & 2020 \\
\bottomrule % 最下面那条线
\end{tabular}
\end{sidewaystable}
Table with multiple columns
\begin{table}[h]
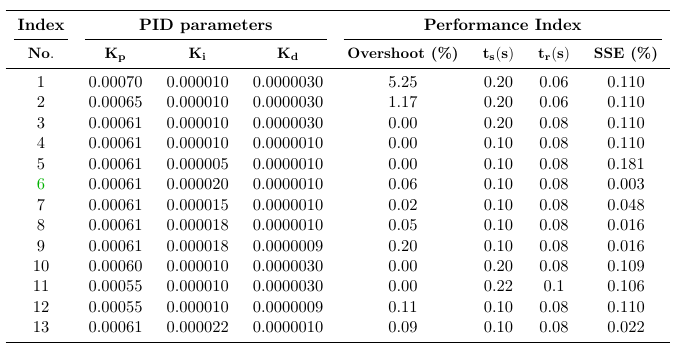
\caption{Experiment data}
\label{tab:exp1}
\setlength{\tabcolsep}{8pt}
\centering
\begin{tabular}{cccccccc}
\toprule % 表格顶部的线
\textbf{Index} & \multicolumn{3}{c}{\textbf{PID parameters}} & \multicolumn{4}{c}{\textbf{Performance Index}} \\ \cmidrule(lr){1-1}\cmidrule(lr){2-4}\cmidrule(lr){5-8}
\centering
\small
\textbf{No}. & \small$\mathbf{K_p}$ & \small$\mathbf{K_i}$ &\small $\mathbf{K_d}$ & \small \textbf{Overshoot (\%)} & \small $\mathbf{t_s (s)}$ & \small$\mathbf{t_r (s)}$ & \small\textbf{SSE (\%)}\\
\midrule % 划线
1 & 0.00070 & 0.000010 & 0.0000030 & 5.25 & 0.20 & 0.06 & 0.110 \\
2 & 0.00065 & 0.000010 & 0.0000030 & 1.17 & 0.20 & 0.06 & 0.110 \\
3 & 0.00061 & 0.000010 & 0.0000030 & 0.00 & 0.20 & 0.08 & 0.110 \\
4 & 0.00061 & 0.000010 & 0.0000010 & 0.00 & 0.10 & 0.08 & 0.110 \\
5 & 0.00061 & 0.000005 & 0.0000010 & 0.00 & 0.10 & 0.08 & 0.181 \\
\textcolor{green!70!black}{6} & 0.00061 & 0.000020 & 0.0000010 & 0.06 & 0.10 & 0.08 & 0.003 \\
7 & 0.00061 & 0.000015 & 0.0000010 & 0.02 & 0.10 & 0.08 & 0.048 \\
8 & 0.00061 & 0.000018 & 0.0000010 & 0.05 & 0.10 & 0.08 & 0.016 \\
9 & 0.00061 & 0.000018 & 0.0000009 & 0.20 & 0.10 & 0.08 & 0.016 \\
10 & 0.00060 & 0.000010 & 0.0000030 & 0.00 & 0.20 & 0.08 & 0.109 \\
11 & 0.00055 & 0.000010 & 0.0000030 & 0.00 & 0.22 & 0.1 & 0.106 \\
12 & 0.00055 & 0.000010 & 0.0000009 & 0.11 & 0.10 & 0.08 & 0.110 \\
13 & 0.00061 & 0.000022 & 0.0000010 & 0.09 & 0.10 & 0.08 & 0.022 \\
\bottomrule % 表格底部的线
\end{tabular}
\end{table}
\usepackage{amsfonts}
\usepackage{booktabs}
\usepackage{siunitx}
\begin{tabular}{SSSSSSSS} \toprule
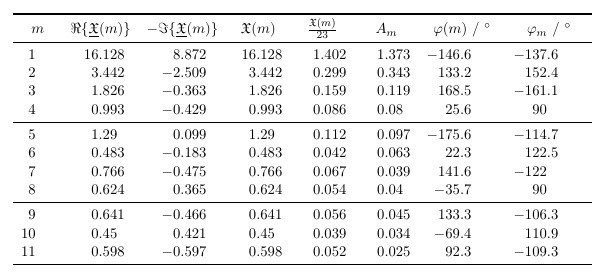
{$m$} & {$\Re\{\underline{\mathfrak{X}}(m)\}$} & {$-\Im\{\underline{\mathfrak{X}}(m)\}$} & {$\mathfrak{X}(m)$} & {$\frac{\mathfrak{X}(m)}{23}$} & {$A_m$} & {$\varphi(m)\ /\ ^{\circ}$} & {$\varphi_m\ /\ ^{\circ}$} \\ \midrule
1 & 16.128 & +8.872 & 16.128 & 1.402 & 1.373 & -146.6 & -137.6 \\
2 & 3.442 & -2.509 & 3.442 & 0.299 & 0.343 & 133.2 & 152.4 \\
3 & 1.826 & -0.363 & 1.826 & 0.159 & 0.119 & 168.5 & -161.1 \\
4 & 0.993 & -0.429 & 0.993 & 0.086 & 0.08 & 25.6 & 90 \\ \midrule
5 & 1.29 & +0.099 & 1.29 & 0.112 & 0.097 & -175.6 & -114.7 \\
6 & 0.483 & -0.183 & 0.483 & 0.042 & 0.063 & 22.3 & 122.5 \\
7 & 0.766 & -0.475 & 0.766 & 0.067 & 0.039 & 141.6 & -122 \\
8 & 0.624 & +0.365 & 0.624 & 0.054 & 0.04 & -35.7 & 90 \\ \midrule
9 & 0.641 & -0.466 & 0.641 & 0.056 & 0.045 & 133.3 & -106.3 \\
10 & 0.45 & +0.421 & 0.45 & 0.039 & 0.034 & -69.4 & 110.9 \\
11 & 0.598 & -0.597 & 0.598 & 0.052 & 0.025 & 92.3 & -109.3 \\ \bottomrule
\end{tabular}
Booktabs style
Regular thick line booktabs
\usepackage{booktabs}
\begin{table}[ht]
\centering
\caption{Thicker horizontal lines above and below the table.}
\begin{tabular}[t]{lcc}
\toprule
&Treatment A&Treatment B\\
\midrule
John Smith&1&2\\
Jane Doe&--&3\\
Mary Johnson&4&5\\
\bottomrule
\end{tabular}
\end{table}%
Reference Materials
- Small Guide to Making Nice Tables Markus Püschel Carnegie Mellon University https://people.inf.ethz.ch/markusp/teaching/guides/guide-tables.pdf
- Professional and clean tables with LaTeX https://texblog.org/2017/02/06/proper-tables-with-latex/